An important objective of the overall kiteboat development is stabilising a kite in traction mode. I have in development a couple of electromechanical autopilots. If these get deployed they will have the disadvantages that all electronics have in a marine environment. This is particularly problematic for the on kite version - if the wind drops out and the kite goes for a swim, so does the control system! Mechanical or aerodynamic stability would be a huge advantage. Peter Lynn arcs famously autozenith. That would be a very handy feature for launching and retrieving - but it's not much use for traction mode. Moreover, having tried arcs several times, I was never able to get good performance.
I tried a small LEI in good wind with a proposed mecahnical stabilising system a few weeks ago with GS (thanks). With very little prior analysis to calibrate relevant lengths, it worked really well. A short mast is near the tow point. The two front lines are fixed at the tow point. A pilot controls the rear lines, which run through blocks at the tow point, until the kite is at the desire elevation, about 45°, on one side of the wind window. The rear lines are then cleated (in our case I held them fixed) at the tow point. A short line (fixed length) goes from the top of the mast to a point on the upper steering line a short distance from the tow point. As the elevation decreases, this control line efffectively shortens that steering line and steers the kite up - it pulls the steering line out of alignment thereby increasing the path length from tow point to kite. As the elevation increases, the control line goes slack and there is no steering input. There is no corresponding steering input on the lower steering line as the weight of the kite provides the restoring force in that direction. The following graphic illustrates the arrangement.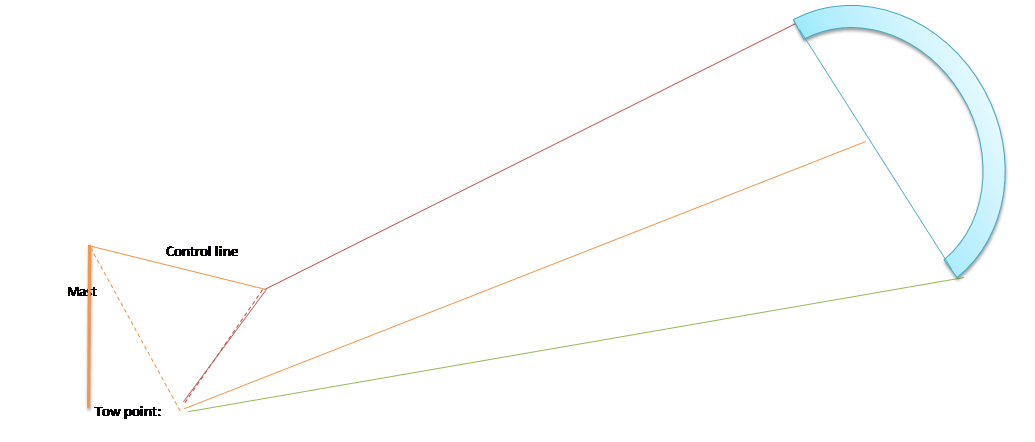
The test used a 4m Ozone Uno on 30m lines in about 18knots of breeze. In this video, GS is holding the mast and I'm holding the steering lines (but not moving them).
Notwithstanding the success of that first experiment, a subsequent outing, on KitetiK with a 9m kite in light wind (~10knots) was not successful. Perhaps that's not surprising as we all know that keeping a kite in traction position in light wind is much more difficult than with good breeze. The main, and worst, problem was that as the kite stalled and fell back in the window, the steering response generated too much steering or the steering input, albeit only to one wing tip, generated a higher stall tendency. This could be overcome by changing the geometry. Eg, move the steering cleat points back from the main tow point (ie back along the line which is the horizontal projection of the front lines when the kite is at the desired elevation and azimuth) so that as the kite drifts back in the window, sheeting is reduced due to the change in azimuth.
As always, any thoughts (eg "this is never going to work because....") are most welcome.
Update, 20190515. A second control line was added. This is cleated (staked in the experimental case) forward and to windward of the kite and is attached to the front lines. As the kite stalls and thereby drops back in the wind window, this line effectively shortens the front lines thereby reducing the angle of attack. This was tested in 10-12knots with the same 4m LEI. The kite flew for about 90 seconds. The video below has not been annotated - so you'll need the audio to get an idea of what's going on.